

Controlando Motores de Corrente Contínua
- CONTROLE DOS MOTORES DE CORRENTE CONTÍNUA
O controle dos motores de corrente contínua (CC), se dá pela sua energização, e variação de potência (uma relação entre força e velocidade) através da variação da tensão entregue a eles. Seu sentido de giro é controlado pela inversão dos polos negativo e positivo, conectados a seus terminais. No sistema A4S, uma placa comercial foi utilizada, conhecida como “ponte dupla H”, que utiliza o circuito integrado L298. Soluções mais simples, com o circuito integrado L293, ou utilizando transistores do tipo Power FET, podem ser desenvolvidas. O circuito utilizado permite o controle de motores que consomem até 2 Ampères, o que é suficiente para o uso pretendido.
Fig.01: - Ponte Dupla H – L298

Fonte: O Autor.
Em sua configuração original, controlando motores CC, a placa L298 pode controlar 2 motores. Cada motor é comandado por 3 sinais, o controle ENB (enable, habilita) pode controlar a potência do motor, quando conectada a saída PWM do Arduino. O sentido de rotação (horário/anti-horário) é controlado através de duas entradas IN1 e IN2 (para o motor 1). Acionando a entrada IN1 e mantendo IN2 desacionada, o motor gira num sentido, invertendo esta configuração, o motor gira no outro sentido. Esta configuração demandaria 2 saídas do Arduino, diminuindo a quantidade de saídas disponíveis para outras aplicações. Buscando contornar esta limitação, um inversor a transistores foi construído, assim utilizando uma única saída do Arduino para controle de sentido de rotação. A montagem foi executada em uma placa de circuito impresso universal, facilitando sua reprodução. O transistor pode ser qualquer NPN de baixa potência, como o BC547, BC548, etc. Por disponibilidade na caixa de sucata, utilizei o 2N2222.
Fig.02: Esquema Elétrico do Controlador de Motores CC, com Inversor a Transistores.

Fonte: O Autor
Fig.- 03: Aspecto Físico do Controlador de Motores CC, com Inversor a Transistores, Vista Superior.
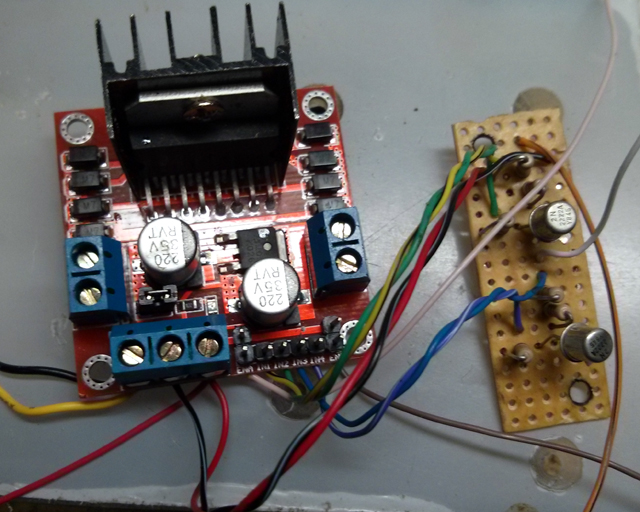
Fonte: O Autor
Fig.04: Aspecto Físico do Controlador de Motores CC, com Inversor a Transistores, Vista Inferior.
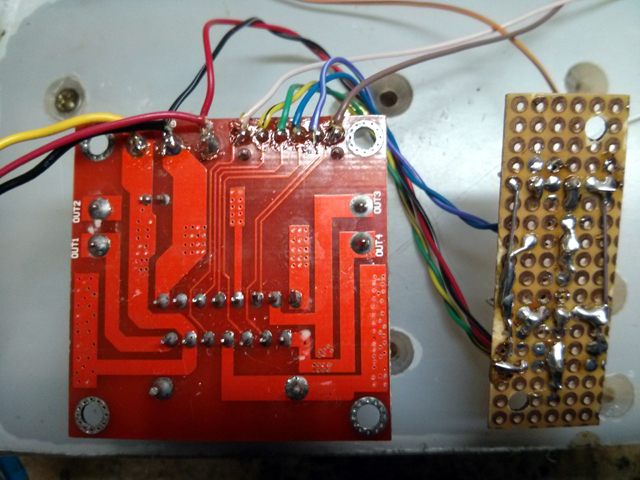
Fonte: O Autor
Tab.01: Conexões da Placa de Controle dos Motores CC.
|
Saída Arduino |
Inversor |
Entrada Placa L298 |
Controle Motor CC |
|
~5 |
|
ENA1 |
Potência M1 |
|
10 |
IN1 e Base do transistor conectado a IN2 |
|
Sentido de Rotação M1 |
|
~6 |
|
ENA2 |
Potência M2 |
|
11 |
IN3 e Base do transistor conectado a IN4 |
|
Sentido de Rotação M2 |
Fig.05: Exemplo de Controle de Motores CC, no S4A.
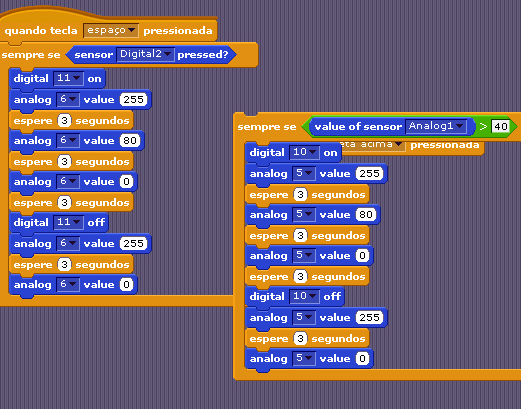
Fonte: O Autor
- CONTROLADOR L293
É importante ressaltar que as informações técnicas de shields disponíveis no Ebay é deficitária, ou inexistente, e isto dificulta sobremaneira o desenvolvimento. A observação logo revelou que os pinos assignados pelo S4A, para controle e sensoriamento, não combinavam com os do shield. Os integrados L293 foram retirados e instalados no protoboard.
Fig.06: Blocos de funcionamento do L293

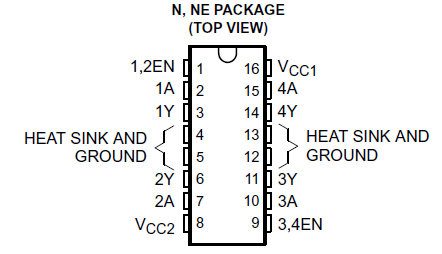
Fig. 07: Pinos do L293
O controle de velocidade se dá pelo pino enable do L293, e uma saída PWM do Arduino foi utilizada para esta finalidade.
Fig. 08: Esquema final do L293 com inversos a transistor.

Fig09: Detalhe do L293 no protoboard

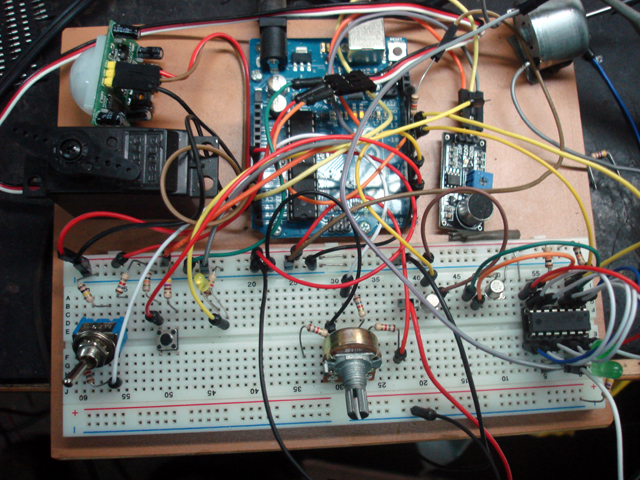
Fig. 10: Sistema de testes do Arduino programado pelo S4A
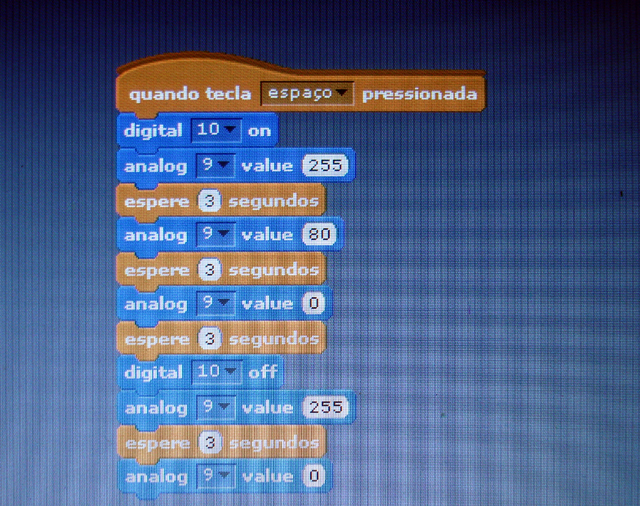
O controle dos motor de CC ficou assignado assim:
- Velocidade – Saída PWM 9
- Sentido- saída digital 10
Fig. 11: Programa de teste do motor CC no S4A
- SHIELD COM O L293
Construí o shield pra o S4A, com controle de dois motores CC, através do circuito integrado L293, providenciando dois interruptores na placa, para facilitar os testes.
Fig. 12: Esquema elétrico do shield utilizando o L293, para o S4A.
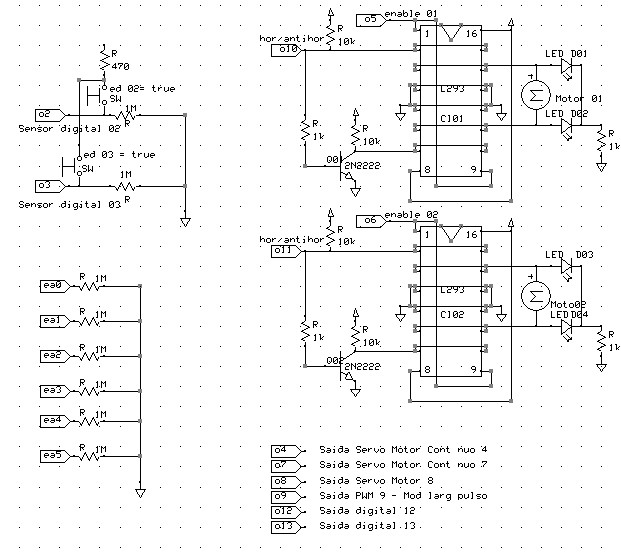
A assignação de pinos de entrada e saída do shield ficou assim definida:
Entradas analógicas -
A0
A1
A2
A3
A4
A5
Entradas Digitais
2 - botão na placa
~3 - botão na placa
Motor (servo motor contínuo)
4
7
Servomotor (0-180)
~8
Saídas digitais
12
13
Saídas analógicas PWM (modulação por largura de pulso)
~9
Motor CC A
Velocidade – Saída 5
Sentido- saída digital 10
Motor CC B
Velocidade – Saída 6
Sentido- saída digital 11
O shield foi montado em uma placa de prototipagem por soldas, disponível no mercado como placa universal. Neste sistema de montagem, as conexões entre os pinos dos componentes eletrônicos é feita pela soldagem direta de fios, facilitando as alterações, sempre necessárias nos desenvolvimentos. Também tem o benefício de não necessitar de conhecimentos específicos para a confecção de placas de circuito impresso e uso de produtos perigosos para corrosão. Como inconveniente, o aspecto visual assume um caráter amador, na montagem.
Fig. 13: Montagem do Shield L293 para S4A
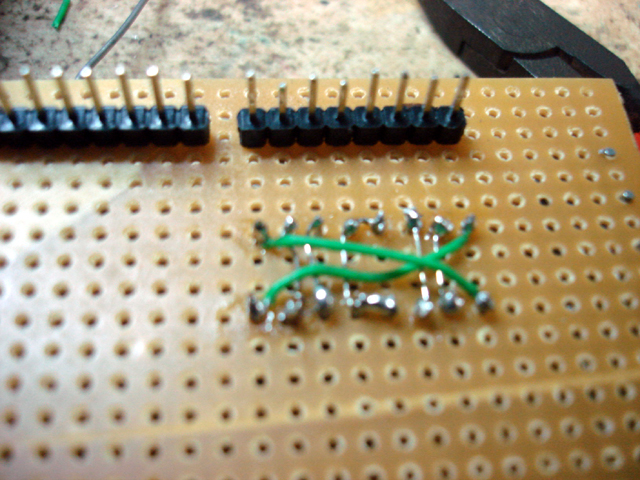
Fig. 14: Montagem do Shield L293 para S4A

Fig. 15: Montagem do Shield L293 para S4A

Fig. 16: Montagem do Shield L293 para S4A
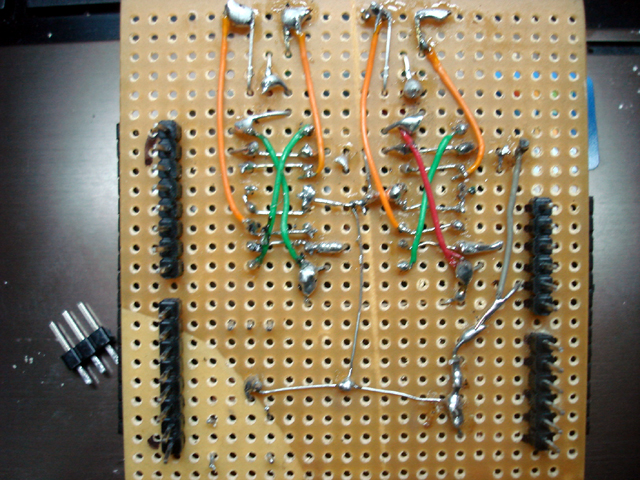
Fig. 17: Montagem do Shield L293 para S4A

Fig. 18: Montagem do Shield L293 para S4A

Fig. 19: Montagem do Shield L293 para S4A
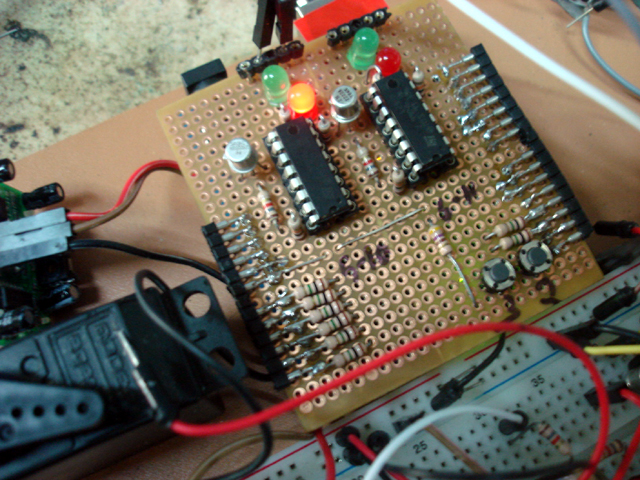
Fig. 20: Montagem do Shield L293 para S4A
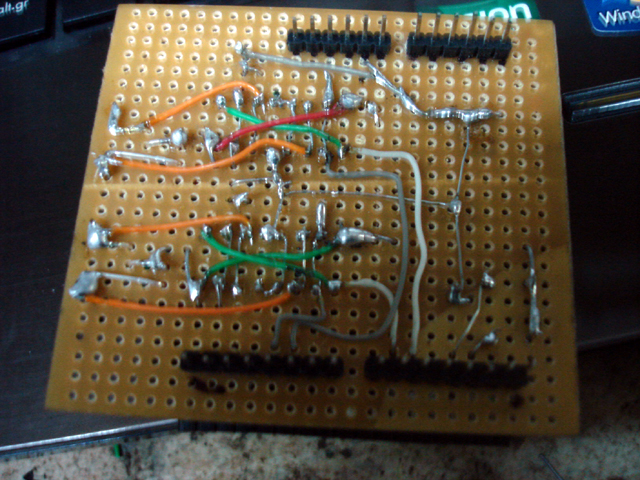
Fig. 21: Shield L293 para S4A, montado.
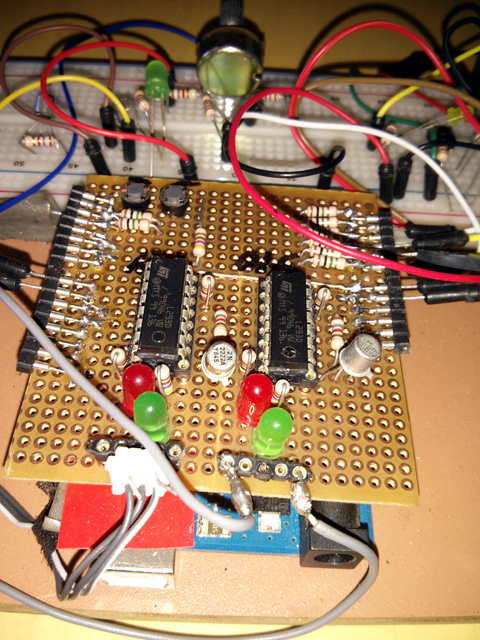
Fig.22: Sistema de teste do Shield L293 para S4A.

Depois de depurado o sistema do Arduino para o Scratch, o sistema montado com base no protoboard pareceu pouco indicado para uso em sala de aula. Os conhecimentos de eletrônica, necessários para o seu uso, demandariam muito tempo para desenvolvimento, o que levaria o escopo das aulas para longe da robótica e uso de controladores microprocessados.
Continue Lendo
Como funciona o Arduino, suas entradas e saídas, cuidados ao trabalhar com Arduino.
Controlando motores de Corrente Contínua.
Construindo o Arduino para o Scratch e sua caixa.
Construindo sensores, para o Arduino e Scratch, sobre peças LEGO.
- Robótica na Educação
- Utilização de LEGO, Arduino e Scratch na educação
- Como Funciona o Arduino, I/O
- Controlando Motores de Corrente Contínua
- Minibloq e arudino
- Scratch para Arduino S4A
- Construindo o Arduino para o Scratch e sua caixa.
- A caixa de comando
- Construindo sensores e atuadores para Lego e Ardui
- LEGO
- Arduino
- Scratch
- Robos feitos com sucata
- Coisas doidas
- Outros sistemas de montagem
- Literatura relacionada
- Tutoriais
- Glossário
- Programas
- Trabalhando com imagens
- Área Reservada
- Contactos



