

Construindo sensores e atuadores para Lego e Ardui
1. DISPOSITIVOS DE ACIONAMENTO (SAÍDAS).
A experimentação, o agir sobre, se torna mais atrativo quando o aluno pode observar ações físicas, como movimentação, luzes, ruídos, etc. Para que o sistema A4S possa “conversar” com o mundo externo, dispositivos acionadores conectados as saídas do A4S se fazem necessários. São disponibilizados motores CC, servomotores, diodos emissores de luz (LED) e interface a relé. As modificações, e adaptações necessárias, estão abaixo descritas.
a. As Modificações dos Motores de Corrente Contínua
A ideia inicial de utilização de micromotores de corrente contínua com redutor acoplado, obtidos em sucatas ou adquiridos no mercado, esbarrou no problema de conexão mecânica entre os seus eixos de transmissão e os dispositivos mecânicos da LEGO®. Além disto, a sua fixação ao sistema e o alinhamento entre as peças mostrou-se trabalhoso, demandando conhecimentos específicos de mecânica de precisão.
A opção recaiu sobre os motores de corrente contínua, padrão da LEGO®, disponibilizados em vários kits, como o Power Functions, vendidos separadamente, em sites de comércio eletrônico. Estes dispositivos são plenamente compatíveis com os sistemas de montagem estrutural da LEGO®, encaixando-se perfeitamente, disponibilizando pontos de conexão mecânica dentro do padrão da LEGO®, alinhando-se sem esforço algum. Assim, o conhecimento técnico necessário e o esforço necessário para a utilização, são reduzidos de forma significativa.
A única modificação necessária está no sistema de conexão elétrica, substituindo os sistemas adotados pela LEGO® por conectores P1 macho, utilizados na Caixa de Controle e no A4S. Nos modelos de motor que apresentam conexão disponível na carcaça, os fios são estanhados diretamente ao motor. Naqueles em que o cabo é solidário ao motor, o cabo é seccionado e emendado a outro, com o conector P1 macho. Após soldados, os cabos são fixados aos motores, com cola, para evitar o arranchamento.
Fig.01 – Modificação da Conexão Elétrica dos Motores de Corrente Contínua LEGO®

Fonte: O autor.
b. Modificação dos Servomotores.
O servo-motor é construído com um motor, um sistema de redução e um sistema de realimentação, interno. Caracteriza-se por funcionar com campo de rotação menor que 180°, e é comandado por ângulos. Por possuir sistema de redução interno, tem uma capacidade de acionamento bastante elevada, movimentando cargas relativamente pesadas, com precisão de posicionamento proporcionada pelo sistema de realimentação.
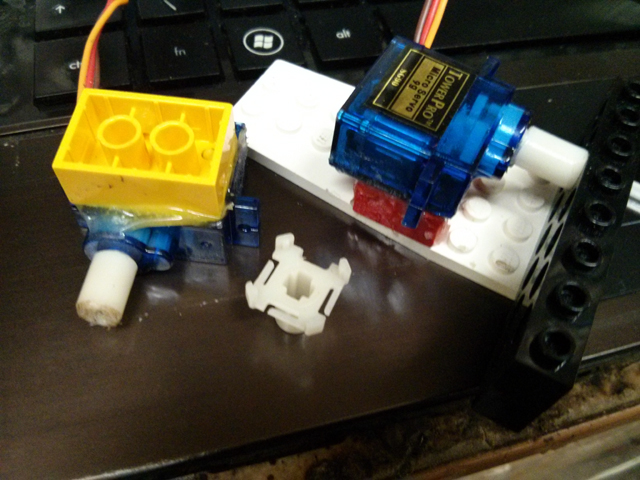
As dificuldades encontradas para o uso de motores CC fora da linha da LEGO®, são encontradas no uso do servo-motor. A conexão do servo-motor com os eixos da LEGO® foi facilitado pelo uso de uma peça encontrada na parte inferior de um teclado de computador, sucateado. Este possui em sua parte interna um sistema em forma de cruz, proporcionando acoplamento perfeito dos eixos.
Fig. 02 – Parte Inferior do Teclado e Detalhe da Peça que Serve de Acoplamento do Eixo no Servo-motor.

Fonte: O Autor
Os eixos devem ficar perfeitamente alinhados com os furos das peças LEGO®, e para isso um sistema de montagem (jig) foi desenvolvido, utilizando uma base e tijolos furados do sistema Technics. O tijolo base, onde o servo-motor foi assentado, deve ter seus pinos superiores de encaixe removidos, por lixamento ou corte. O servo-motor foi colado na superfície do tijolo 3 x 2, modificado, com o uso de cola “veda-calha” transparente, que proporcionou ótima fixação.
Fig. 03 – Servo-motor, acoplamento do eixo e jig de montagem.
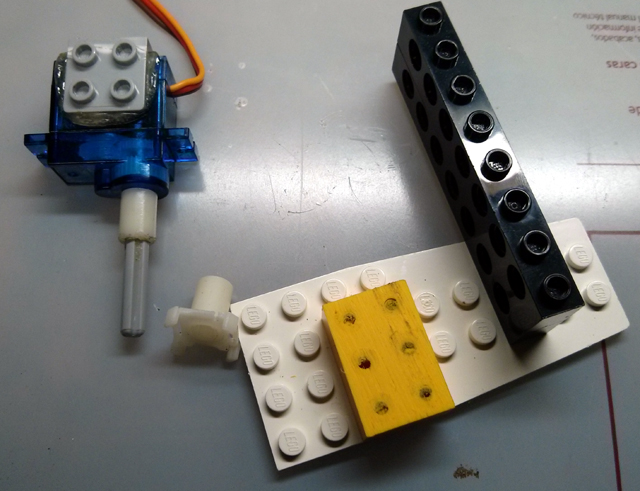
Fonte: O Autor
Fig.04 – Verificação do Alinhamento entre o Servo-motor, acoplamento do eixo e jig de montagem.

Fonte: O autor
Fig.05 – Verificação do Alinhamento entre o Servo-motor, acoplamento do eixo e jig de montagem.
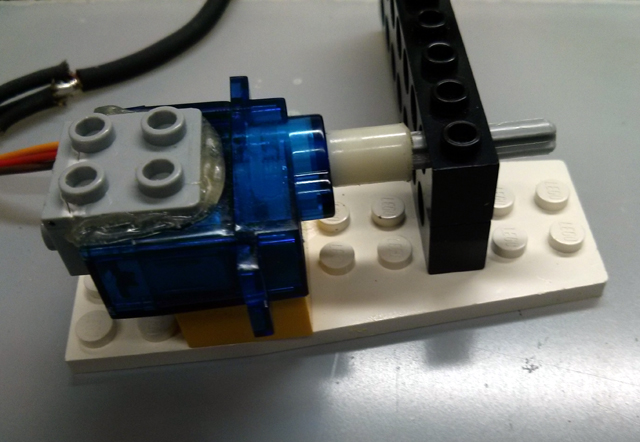
Fonte: O Autor
Fig. 06 – Servo-motor Montado.
Fonte: O Autor.
Fig.07: Teste de Movimentação do Servo-motor.
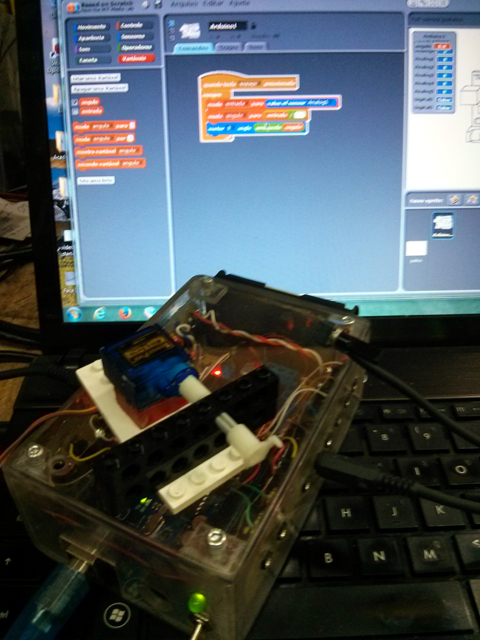
Fonte: O Autor.
Fig.08: - Programa de Controle do Servo-motor, a Partir de um Sensor Analógico, no S4A.

Fonte: O Autor.
As luzes sempre são muito atraentes e proporcionam uma interessante forma de interação no controle de saídas. Os diodos emissores de luz (LED) são semicondutores que produzem luz visível, quando percorridos por uma corrente elétrica. Tem durabilidade ilimitada e basta um resistor conectado em série, para sua utilização direta nas saídas do Arduino. Existem várias cores, e os modelos de alta intensidade, de luz branca, produzem alto brilho.
Fig.09: - Diodos Emissores de Luz.

Fonte: O Autor.
Fig.10: - Diodos emissores de luz de alto brilho.
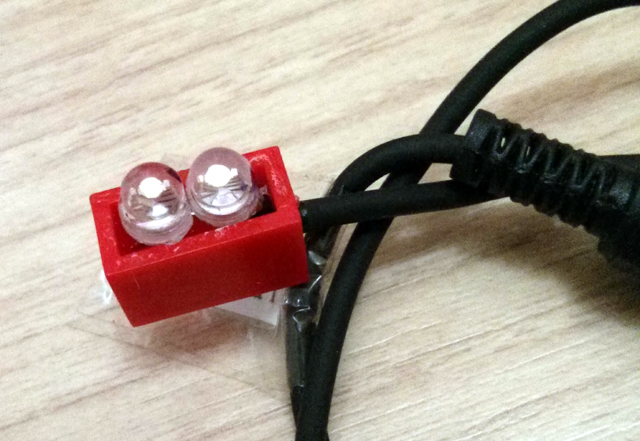
Fonte: O Autor.
Quando as cargas, a comandar, excedem a capacidade de fornecimento do Arduino, um relé externo pode ser utilizado. Uma placa comercial, específica para o Arduino e opto acoplada, foi utilizada e colada sobre um tijolo LEGO® 8x2, com cola “veda-calha”.
Fig.11 - Relé
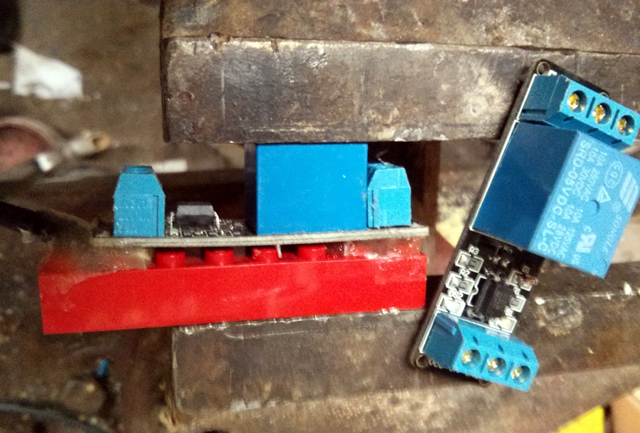
Fonte: O Autor
2. DISPOSITIVOS DE ENTRADA, SENSORES.
Para que o A4S possa “sentir” o mundo, através de interações do aluno, ou através de alterações no ambiente, ou no dispositivo “robótico” construído, dispositivos de sensoriamento foram desenvolvidos. Alguns foram desenvolvidos com peças de sucata, outros, compatíveis com o Arduino, foram adquiridos. Todos foram montados sobre tijolos LEGO®, para facilitar sua aplicação e fixação.
Dois tipos de sensores estão disponibilizados para uso, digitas (assumem dois estados, ligado ou desligado) e analógicos (assumem qualquer estado entre 0 e 1024).
Alguns dos sensores comerciais necessitaram de pequenas modificações para seu correto funcionamento junto ao A4S.
Os sensores digitais simples são conectados entre o terminal positivo e o terminal de entrada, uma vez que resistores “pull-down” são disponibilizados nas entradas do A4S.
Fig. 12 – Esquema Elétrico de Conexão dos Sensores Digitais Simples
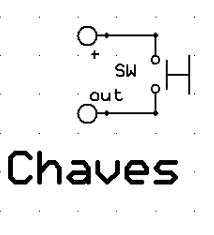
Fonte: O Autor
Simples chave de acionamento mecânico, obtida na sucata. Normalmente assume o estado aberto (NA), quando acionada manualmente assume o estado ligado, retornando ao estado anterior, quando a ação mecânica sessa. É um sensor do tipo digital.
Fig. 13 - Interruptor

Fonte: O Autor
As chaves de fim-de-curso, também conhecidas por “micro-switch”, são chaves interruptoras de acionamento mecânico, com diversos tipos de alavancas. Normalmente possuem um contato reversor, que pode funcionar como normalmente aberto (NA) ou como normalmente fechado (NF). No sistema montado para o A4S foi utilizada a configuração NA, uma vez que através de configuração de programa esta lógica é facilmente invertida. Algumas chaves foram adquiridas no comércio de material elétrico para uso industrial, no modelo alavanca simples e montadas em tijolos 4 x 2. É um sensor do tipo digital.
Fig. 14 – Chave Fim-de-curso

Fonte: O Autor
Algumas chaves de fim-de-curso, miniatura, foram retiradas sucata de um reprodutor de DVD. As chaves foram montadas sobre tijolos 1/3 1 x 2.
Fig. 15 – Micro chave fim-de-curso

Fonte: O Autor
O sensor de toque, do conjunto LEGO® RCX, dispõe de uma chave fim de curso, também é utilizado no conjunto. É um sensor digital.
Fig.16 – Chave do conjunto RCX
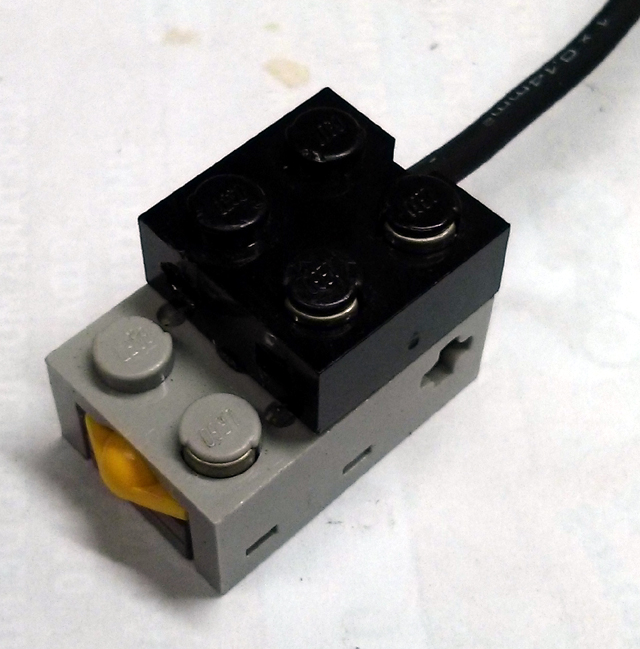
Fonte: O Autor
O sensor de inclinação (tilt) detecta inclinação do sistema onde está montado. A chave foi reaproveitada de sucata, porém, sensores específicos para o Arduino são facilmente encontrados no mercado. É um sensor do tipo digital.
A ampola sensível, por ser de vidro, foi montada na parte interna de um tijolo 6x2, que teve seu “miolo” removido com a ajuda de uma retífica. Seu fundo foi fechado com um tijolo 1/3 6x2. Todo sistema foi lacrado com cola “veda-calha”, para evitar possíveis acidentes em caso de quebra.
Fig.17 – Sensor de Inclinação

Fonte: O Autor
Os sensores magnéticos (reed-switch), são chaves acionadas por campo magnético, e podem ser obtidas no mercado de componentes eletrônicos. Ao atravessarem um campo magnético, a lâmina de um de seus contatos é atraída e o contato se fecha. Um ímã deve ser disponibilizado, para acionamento. A montagem do ímã foi executada em um tijolo 2 x 1 e o sensor magnético foi colado na parte interior de um tijolo 3 x 2. É um sensor do tipo digital.
Fig. 18 – Sensor Magnético e Ímã.

Fonte: O Autor
e. Sensores de Proximidade Infravermelho.
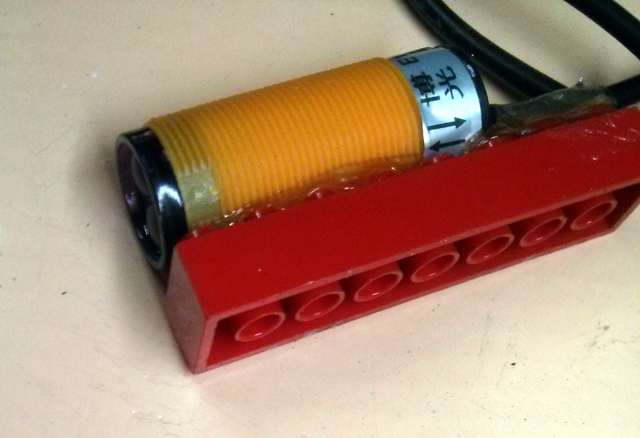
O sensor de proximidade infravermelho tem seu funcionamento baseado na emissão e recepção de luz infravermelha (IV). Um diodo emissor lança um raio de luz IV, este pode iluminar diretamente um sensor de luz IV (barreira), ou ser refletido por algum objeto (reflexivo), dependendo da configuração do sensor. Os que operam no modo reflexivo, tem largo uso na detecção de obstáculos. Nas versões aqui utilizadas, são sensores do tipo digital. O modelo industrial, montado em um tubo roscado, tem como alternativa o ajuste da distância em que o sensor é acionado, através de um parafuso, na parte traseira.
Fig. 19 – Sensor IV reflexivo
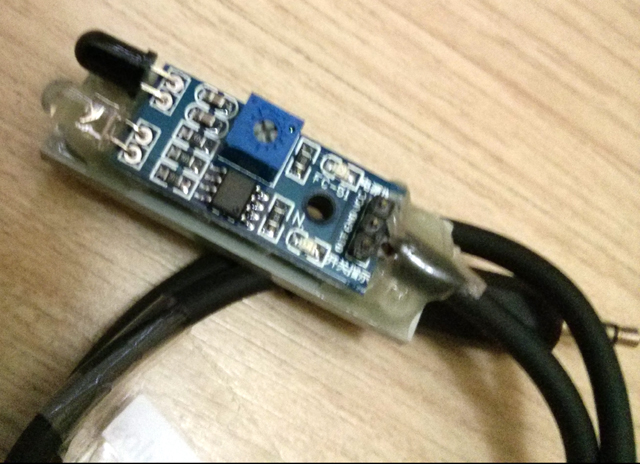
Fig. 20 – Sensor IV reflexivo, de uso industrial.
Outro tipo de sensor IV utilizado é do tipo barreira, que detecta a passagem de um objeto em seu interior. Estes sensores foram obtidos de sucata de reprodutores de DVD. Um circuito de polarização se fez necessário, para seu funcionamento no A4S e na Caixa de Comando. Cuidado deve ser dado à montagem, para que exista alinhamento vertical, com o sistema LEGO®, e um sistema de montagem (Jig) foi desenvolvido, proporcionando os alinhamentos e espaçamentos corretos, durante a colagem ao tijolo 1/3 3 x 2.
Fig.21 – Sensor IV tipo Barreira, esquema elétrico
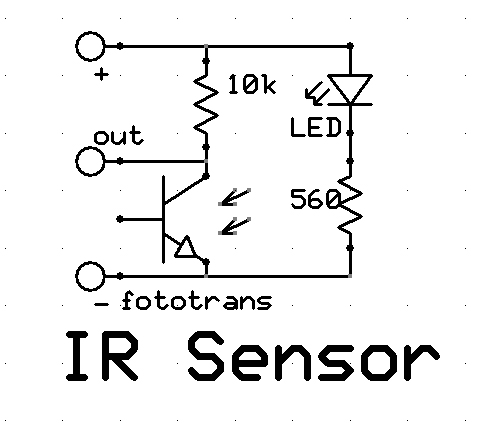
Fig. 22 – Sensor IV tipo Barreira
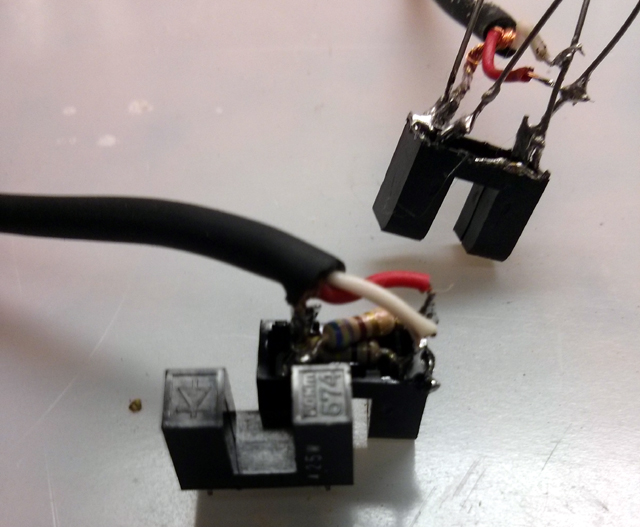
Fig. 23 – Sensor IV tipo Barreira, alinhamento mecânico

O sensor de presença PIR é conhecido como sensor de movimentação ambiental, em alarmes residenciais. Costumam ser vistos pendurados em paredes, com um LED interno que se ilumina, quando existe movimentação no ambiente. É projetado para detectar movimento de seres vivos com certo volume corpóreo. No sistema A4S o sensor foi utilizado sem a caixa externa, desnecessária nesta aplicação, montado em um tijolo 4 x 2. É um sensor digital.
Fig.24 – Sensor de presença PIR
O sensor de som é uma chave eletrônica, ativada por som. A placa comercial não funcionou corretamente nos sistemas utilizados. Uma placa com um circuito eletrônico, condicionador de sinal, foi construído e adicionado à placa, funcionando corretamente. O conjunto foi montado sobre um tijolo 1/3 10 x 2. É um sensor digital, que aciona sua saída quando um determinado nível de pressão sonora atinge seu microfone sensor.
Fig. 25 – Esquema elétrico da modificação do sensor de som.

Fig. 26 – Sensor de som.

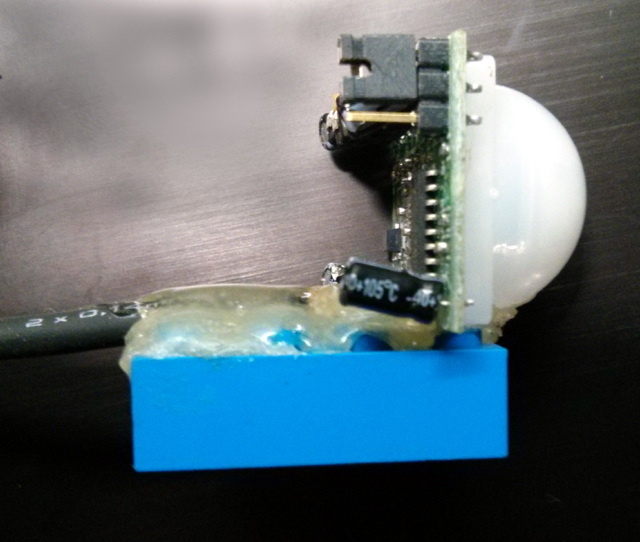
O sensor de temperatura é uma placa comercial, destinada ao Arduino, que proporciona uma variação de sinal em função da variação da temperatura no elemento sensor. O circuito não apresenta calibração, e por isso a relação entre temperatura e sinal de saída, deve ser determinada. Seu uso é restrito as temperaturas ambientais, não devendo exceder os 60° Celsius. A placa foi colada sobre uma placa 1/3 3 x 2. É um sensor analógico.
Fig.27 – Sensor de temperatura.

O sensor de luminosidade é construído com um elemento que varia seu valor de resistência em função da variação da intensidade luminosa que recebe. Normalmente são construídos tendo como base óxidos fotossensíveis. O sensor tem a denominação comercial de Light Depending Resistor (LDR, resistor dependente de luz) e está disponível em diversos tamanhos. Estes sensores são largamente utilizados em sistemas de iluminação pública, conhecidos popularmente como fotocélulas. Uma placa compatível com o Arduino é disponibilizada no comércio. O sensor utiliza peças reaproveitadas de sucata de fotocélulas queimadas e foi montado sobre um tijolo 2 x 2. Um resistor deve ser utilizado para a sua polarização. É um sensor analógico.
Fig. 28 – Esquema elétrico de conexão do sensor de luminosidade

Fig.29 –Sensor de luminosidade

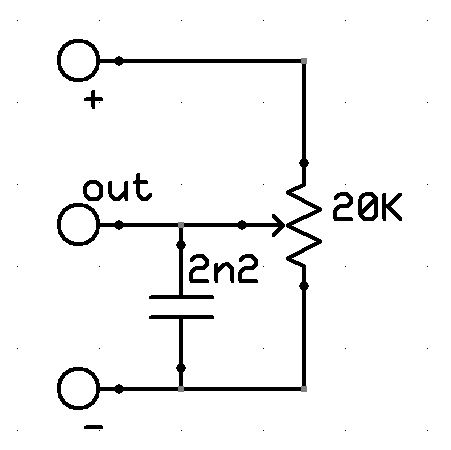
O potenciômetro é um dispositivo que varia a resistência em um de seus terminais em função da posição angular de seu eixo de movimentação, podendo variar entre 0 a 270° . É largamente utilizado em sistemas de som, televisores, rádios, etc., para ajustar o volume de som. Os potenciômetros foram reaproveitados de sucata de televisores antigos. O potenciômetro tem valor de 20 kΩ, dimensões diminutas, eixo padrão e foi montado sobre um tijolo 1/3 4 x 2. Um capacitor foi adicionado para diminuir o ruído provocado pela movimentação do cursor sobre a trilha resistiva, devido à alta impedância de entrada do Arduino. Um botão (knob) foi instalado sobre o eixo, visando melhor realimentação da posição do cursor e para facilitar o manuseio. É um sensor analógico.
Fig. 30 – Esquema elétrico de conexão do potenciômetro

Continue Lendo
Como funciona o Arduino, suas entradas e saídas, cuidados ao trabalhar com Arduino.
Controlando motores de Corrente Contínua.
Construindo o Arduino para o Scratch e sua caixa.
Construindo sensores, para o Arduino e Scratch, sobre peças LEGO.
- Robótica na Educação
- Utilização de LEGO, Arduino e Scratch na educação
- Como Funciona o Arduino, I/O
- Controlando Motores de Corrente Contínua
- Minibloq e arudino
- Scratch para Arduino S4A
- Construindo o Arduino para o Scratch e sua caixa.
- A caixa de comando
- Construindo sensores e atuadores para Lego e Ardui
- LEGO
- Arduino
- Scratch
- Robos feitos com sucata
- Coisas doidas
- Outros sistemas de montagem
- Literatura relacionada
- Tutoriais
- Glossário
- Programas
- Trabalhando com imagens
- Área Reservada
- Contactos




